목차: Series 1 – Index + Methodology (Link)
이전 글: Series 2 –First Image (Link)
다음 글: Series 4 –Classing Up the GPU (Link)
이번 장에서는 “__global__”, “__host__”, “__device__” 사용에 관해서 설명한다. 앞에서 작성한 코드 중 GPU에서 실행될 Function에 “__global__”을 함수 이름 앞에 작성하였다. “__global__”의 경우 GPU에서 실행할 함수를 의미한다. 보통 CPU에서 처음 호출할 함수 앞에 작성한다. “__global__”로 작성된 함수를 호출하여서 연산이 수행하고 완료되는 구간을 Kernel이라고 한다. 여러 개의 “__global__” 함수를 호출하는 경우 여러 개의 Kernel 연산을 수행한 것이다. “__device__”의 경우 “__global__”과 거의 동일하게 GPU에서 연산을 수행할 함수 앞에 작성하게 된다. 하지만, “__global__” 과 달리 보통 GPU에서 호출할 함수 앞에 붙이게 된다. CPU에서 “__device__”로 작성된 함수를 호출하면 실행되지 않는다. “__host__”의 경우 CPU에서 동작할 함수 앞에 붙이게 된다. GPU에서 연산할 수 없으며 오직 CPU에서만 실행할 수 있다.
출처 2에서 Vec3 Class를 만들었다. 해당 Class는 그래픽 관련 연산을 효율적으로 하기 위해 필요한 연산을 포함한다. 이 부분을 CPU/GPU에서 모두 실행할 수 있도록 변경한다. 아래 코드 1은 Vec3 Class를 CPU/GPU에서 모두 사용할 수 있도록 변경한 코드이다.
코드 1: GPU에서 실행 가능하도록 Vec3 함수 변경 코드
#ifndef MKVEC3_H
#define MKVEC3_H
#include <math.h>
#include <stdlib.h>
#include <iostream>
//MK: (코드 1-1) __host__, __device__를 추가해서 CPU/GPU 모두 호출가능하도록 수정함
//MK: 그 이외 모든 부분을 기존 CPU코드와 동일함
class vec3{
public:
__host__ __device__ vec3(){}
__host__ __device__ vec3(float e0, float e1, float e2){
element[0] = e0;
element[1] = e1;
element[2] = e2;
}
__host__ __device__ inline float x() const{ return element[0];}
__host__ __device__ inline float y() const{ return element[1];}
__host__ __device__ inline float z() const{ return element[2];}
__host__ __device__ inline float r() const{ return element[0];}
__host__ __device__ inline float g() const{ return element[1];}
__host__ __device__ inline float b() const{ return element[2];}
__host__ __device__ inline const vec3& operator+() const{ return *this;}
__host__ __device__ inline vec3 operator-() const {return vec3(-element[0], -element[1], -element[2]);}
__host__ __device__ inline float operator[] (int i) const {return element[i];}
__host__ __device__ inline float &operator[] (int i) {return element[i];}
__host__ __device__ inline vec3& operator+=(const vec3 &v){
element[0] += v.element[0];
element[1] += v.element[1];
element[2] += v.element[2];
return *this;
}
__host__ __device__ inline vec3& operator-=(const vec3 &v){
element[0] -= v.element[0];
element[1] -= v.element[1];
element[2] -= v.element[2];
return *this;
}
__host__ __device__ inline vec3& operator*=(const vec3 &v){
element[0] *= v.element[0];
element[1] *= v.element[1];
element[2] *= v.element[2];
return *this;
}
__host__ __device__ inline vec3& operator/=(const vec3 &v){
element[0] /= v.element[0];
element[1] /= v.element[1];
element[2] /= v.element[2];
return *this;
}
__host__ __device__ inline vec3& operator*=(const float t){
element[0] *= t;
element[1] *= t;
element[2] *= t;
return *this;
}
__host__ __device__ inline vec3& operator/=(const float t){
float k = 1.0/t;
element[0] *= k;
element[1] *= k;
element[2] *= k;
return *this;
}
__host__ __device__ inline float length() const{
return sqrt(element[0] * element[0] + element[1] * element[1] + element[2] * element[2]);
}
__host__ __device__ inline float squared_length() const{
return (element[0] * element[0] + element[1] * element[1] + element[2] * element[2]);
}
__host__ __device__ inline void make_unit_vector(){
float k = 1.0 / (sqrt(element[0] * element[0] + element[1] * element[1] + element[2] * element[2]));
element[0] *= k;
element[1] *= k;
element[2] *= k;
};
float element[3];
};
inline std::istream& operator>>(std::istream &is, vec3 &t){
is >> t.element[0] >> t.element[1] >> t.element[2];
return is;
}
inline std::ostream& operator<<(std::ostream &os, const vec3 &t){
os << t.element[0] << t.element[1] << t.element[2];
return os;
}
__host__ __device__ inline vec3 operator+(const vec3 &v1, const vec3 &v2){
return vec3(v1.element[0] + v2.element[0], v1.element[1] + v2.element[1], v1.element[2] + v2.element[2]);
}
__host__ __device__ inline vec3 operator-(const vec3 &v1, const vec3 &v2){
return vec3(v1.element[0] - v2.element[0], v1.element[1] - v2.element[1], v1.element[2] - v2.element[2]);
}
__host__ __device__ inline vec3 operator*(const vec3 &v1, const vec3 &v2){
return vec3(v1.element[0] * v2.element[0], v1.element[1] * v2.element[1], v1.element[2] * v2.element[2]);
}
__host__ __device__ inline vec3 operator/(const vec3 &v1, const vec3 &v2){
return vec3(v1.element[0] / v2.element[0], v1.element[1] / v2.element[1], v1.element[2] / v2.element[2]);
}
__host__ __device__ inline vec3 operator*(const float t, const vec3 &v){
return vec3(t * v.element[0], t * v.element[1], t * v.element[2]);
}
__host__ __device__ inline vec3 operator/(const vec3 &v, const float t){
return vec3(v.element[0]/t, v.element[1]/t, v.element[2]/t);
}
__host__ __device__ inline vec3 operator*(const vec3 &v, const float t){
return vec3(v.element[0] * t, v.element[1] * t, v.element[2] * t);
}
__host__ __device__ inline float dot(const vec3 &v1, const vec3 &v2){
return (v1.element[0] * v2.element[0] + v1.element[1] * v2.element[1] + v1.element[2] * v2.element[2]);
}
__host__ __device__ inline vec3 cross(const vec3 &v1, const vec3 &v2){
return vec3(
(v1.element[1] * v2.element[2] - v1.element[2] * v2.element[1]),
-(v1.element[0] * v2.element[2] - v1.element[2] * v2.element[0]),
(v1.element[0] * v2.element[1] - v1.element[1] * v2.element[0])
);
}
__host__ __device__ inline vec3 unitVector(vec3 v){
return (v/v.length());
}
#endif
위 코드가 기존 CPU 코드와 다른 부분은 “__host__”와 “__device__”라는 문구가 모든 함수 이름 앞에 있는 것이다. “__host__”와 “__device__”를 모두 사용했기 때문에 모든 함수는 CPU와 GPU에서 실행 가능하다는 의미이다. 하지만, “__global__”이 없는 관계로 GPU에서 시작하는 함수는 아니다.
코드 2: Vec3 함수를 사용하기 위한 Main 코드
#include <iostream>
#include <fstream>
#include <time.h>
#include "mkVec3.h"
using namespace std;
//MK: FB 사이즈
int nx = 1200;
int ny = 600;
// limited version of checkCudaErrors from helper_cuda.h in CUDA examples
//MK: #val은 val 전체를 String으로 Return 함
#define checkCudaErrors(val) check_cuda( (val), #val, __FILE__, __LINE__ )
//MK: Error 위치를 파악하기 위해서 사용
void check_cuda(cudaError_t result, char const *const func, const char *const file, int const line) {
if (result) {
cerr << "MK: CUDA ERROR = " << static_cast<unsigned int>(result) << " at " << file << ":" << line << " '" << func << "' \n";
// Make sure we call CUDA Device Reset before exiting
cudaDeviceReset();
exit(99);
}
}
//MK: (코드 2-1) Kernel 코드. GPU에서 수행할 함수
//MK: Vec3를 사용할 수 있도록 코드를 변경함
__global__ void mkRender(vec3 *fb, int max_x, int max_y) {
//MK: Pixel 위치 계산을 위해 ThreadId, BlockId를 사용함
int i = threadIdx.x + blockIdx.x * blockDim.x;
int j = threadIdx.y + blockIdx.y * blockDim.y;
//MK: 계산된 Pixel 위치가 FB사이즈 보다 크면 연산을 수행하지 않음
if((i >= max_x) || (j >= max_y)){
return;
}
//MK: FB Pixel 값 계산
int pixel_index = j*max_x + i ;
fb[pixel_index] = vec3(float(i)/max_x, float(j)/max_y, 0.2f);
}
int main() {
//MK: Thread Block 사이즈
int tx = 8;
int ty = 8;
cout << "MK: Rendering a " << nx << "x" << ny << " Image ";
cout << "MK: in " << tx << "x" << ty << " Thread Blocks.\n";
int num_pixels = nx*ny;
size_t fb_size = num_pixels*sizeof(vec3);
//MK: FB 메모리 할당 (cudaMallocManaged 는 Unitifed Memory를 사용 할 수 있도록 함)
//MK: 필요에 따라 CPU/GPU에서 GPU/CPU로 데이터를 복사함
//MK: (코드 2-2) Vec3를 사용할 수 있도록 코드를 변경함
vec3 *fb;
checkCudaErrors(cudaMallocManaged((void **)&fb, fb_size));
clock_t start, stop;
start = clock();
//MK: GPU (CUDA) 연산을 위해서 Thread Block, Grid 사이즈 결정
dim3 blocks(nx/tx+1,ny/ty+1);
dim3 threads(tx,ty);
//MK: CUDA 함수 호출
mkRender<<<blocks, threads>>>(fb, nx, ny);
checkCudaErrors(cudaGetLastError());
//MK: CUDA 연산이 완료되길 기다림
checkCudaErrors(cudaDeviceSynchronize());
//MK: 연산 시간과 끝 부분을 계산하여서 연산 시간을 측정함
//MK: CPU 코드와 동일하게 결과를 파일에 작성
//MK: (코드 2-3) Vec3를 사용할 수 있도록 코드를 변경함
string fileName = "Ch3_gpu.ppm";
ofstream writeFile(fileName.data());
if(writeFile.is_open()){
writeFile.flush();
writeFile << "P3\n" << nx << " " << ny << "\n255\n";
for (int j = ny-1; j >= 0; j--) {
for (int i = 0; i < nx; i++) {
size_t pixel_index = j*nx + i;
int ir = int(255.99*fb[pixel_index].r());
int ig = int(255.99*fb[pixel_index].g());
int ib = int(255.99*fb[pixel_index].b());
writeFile << ir << " " << ig << " " << ib << "\n";
}
}
writeFile.close();
}
//MK: 메모리 Free
checkCudaErrors(cudaFree(fb));
//MK: 연산 시간과 끝 부분을 계산하여서 연산 시간을 측정함
stop = clock();
double timer_seconds = ((double)(stop - start)) / CLOCKS_PER_SEC;
cout << "MK: GPU (CUDA) Took " << timer_seconds << " Seconds.\n";
return 0;
}
코드 2는 새로 작성한 Vec3 Class를 사용하기 위한 Main 코드이다. 기존 Float로 생성한 FrameBuffer (FB) 메모리를 Vec3으로 변경하였다. 추가로 “mkRender”함수 안에 Vec3 함수를 사용하는 것을 확인 할 수 있다.
 그림 1: 결과 이미지
그림 1: 결과 이미지
NVCC 컴파일러를 사용해서 컴파일 후 실행하면 위 그림 1을 확인 할 수 있다. 이전 글에서 작성한 코드와 동일한 결과이다. 혹시 코드를 원하시는 분이 있을 수도 있어서 아래 출처 3에 CPU/GPU 코드를 공유하였다.
성능 측정 결과
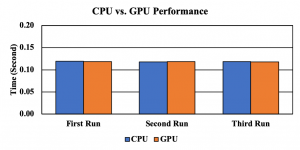 그림 2: CPU/GPU 실행 시간 결과
그림 2: CPU/GPU 실행 시간 결과
그림 2는 CPU/GPU 성능 측정 결과이다. 이전 글과 동일하게 대부분의 연산이 결과를 파일에 작성하는 부분이기 때문에 CPU/GPU성능에 큰 차이가 없다.
출처
- https://devblogs.nvidia.com/accelerated-ray-tracing-cuda/
- http://www.realtimerendering.com/raytracing/Ray%20Tracing%20in%20a%20Weekend.pdf
- https://github.com/mkblog-cokr/CudaRTSeries